Plastic Ant Battlebot
Plastic Ant Battlebot project. The latest in the line of bois, this 1 lb plant is fondly referred to as Flippyboi. This was my attempt for my ~semester robot-in-3-days competition, where I try my best to build a robot for the Northeastern Robotics Combat competition.
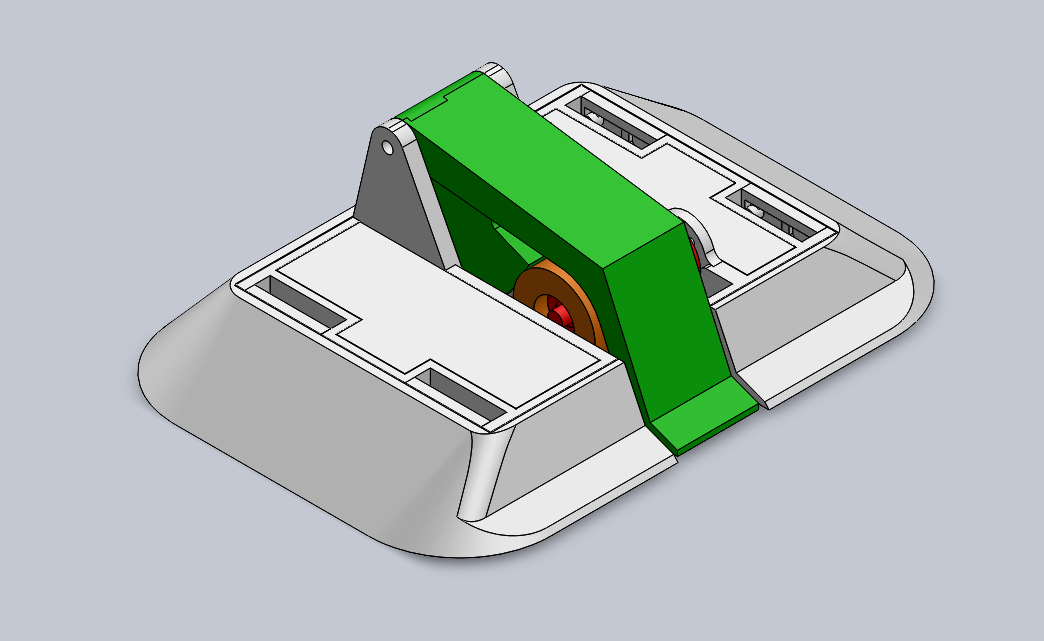
This one is based off of the proposed 12lb robot “Dog” which utilizes a flywheel flipper archetype. This means that an internal flywheel stores energy, which is transferred to a flipper arm with a clutch mechanism. When the clutch is triggered, the flywheel immediately imparts all of it’s angular momentum into the flipper arm, transferring all the energy into the opponent robot.
This archetype of robot is rarely seen in lower weight classes. The complexity of a clutch strong enough to withstand the energy transfer makes fitting it within smaller robots quite difficult. Traditionally, a disk clutch (like in a motorcycle) or a dog clutch would be used. My solution of this is a centripetal magnetic clutch. This design has a pin held in the flywheel by a magnet. When the flywheel is spinning slowly, the centripetal force is weaker than the magnetic force.
However, once the flywheel spins at a sufficient speed, the centripetal force overpowers the magnetic force, and the pin is flung outwards. This then links the flywheel to an external gear ring, instantly transferring energy to the arm.
The clutch engagement speed was calculated using the standard equilibrium force methods, with the pull force being calculated experimentally using a scale. This gave an approximate bolt length, after which the exact engagement speed was fine tuned by grinding the pin to length by trial and error. I aimed for an engagement speed of about 15,000 RPM as a balance between power and durability based off of the motor specs. I don’t know if I actually hit this as I didn’t have a tachometer, but it triggered at roughly the right input power.
The rest of the robot is unremarkable in terms of engineering. The robot managed to be finished on time and competed. It did not do particularly well, due to the fragility of the mechanism. I ran into the mechanical limits of the plastic materials required to be used. Many iterations were made to fix the cracking of either the inner housing or the outer ring.
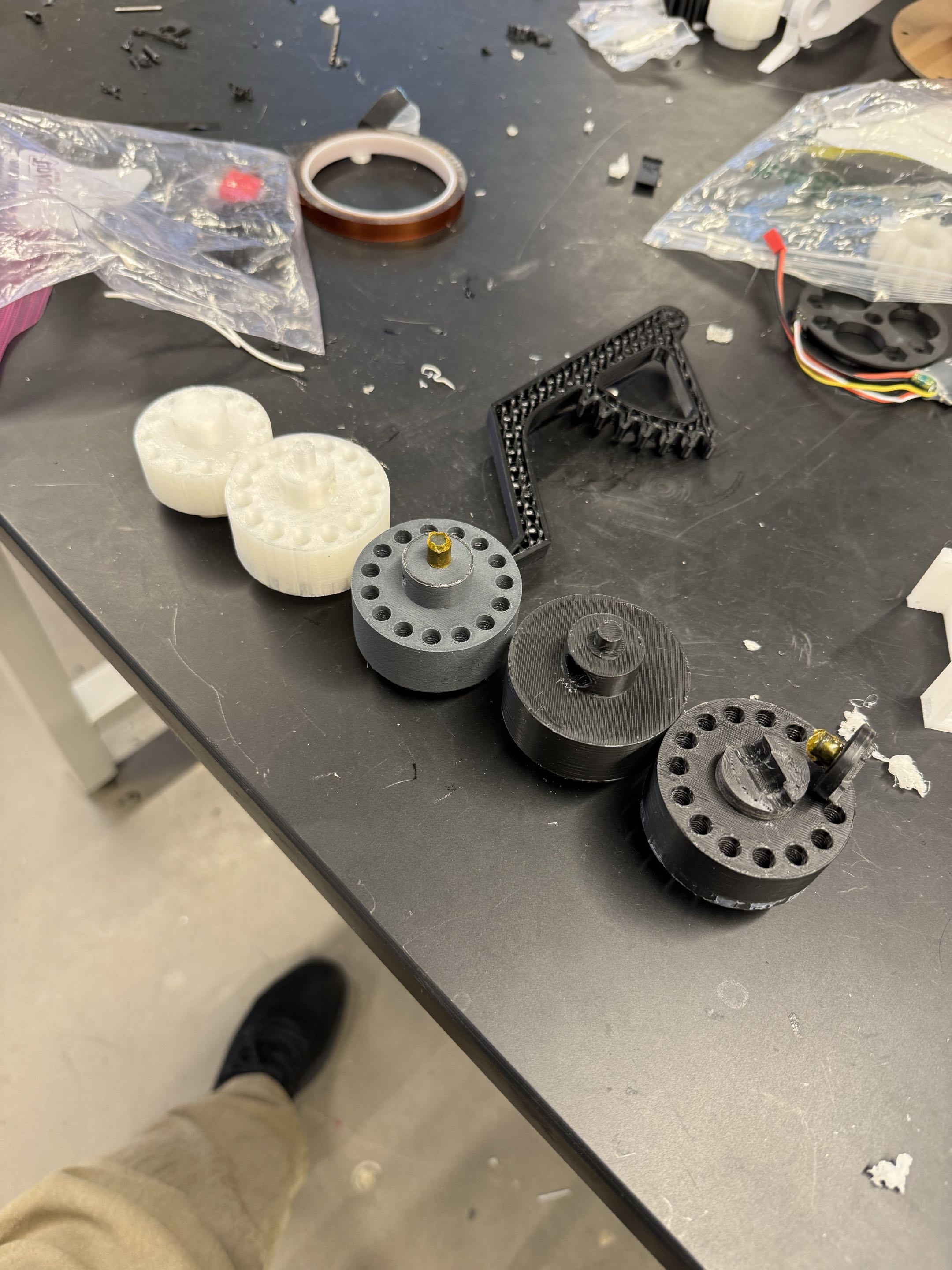
Even after all of this, the clutch was unable to withstand more than 3 loaded impacts, with the outer ring sustaining damage and jamming the mechanism. Reflecting for future thoughts, I think I need a better clutch mechanism, this current one simply isn’t strong enough for plastic. Perhaps multiple or wider area pins.


